Այս մաքինան կիրառվում է կարգավոր հավասարակշեռության փորձերի համար մինի և փոքր մոտորների դեպքում:
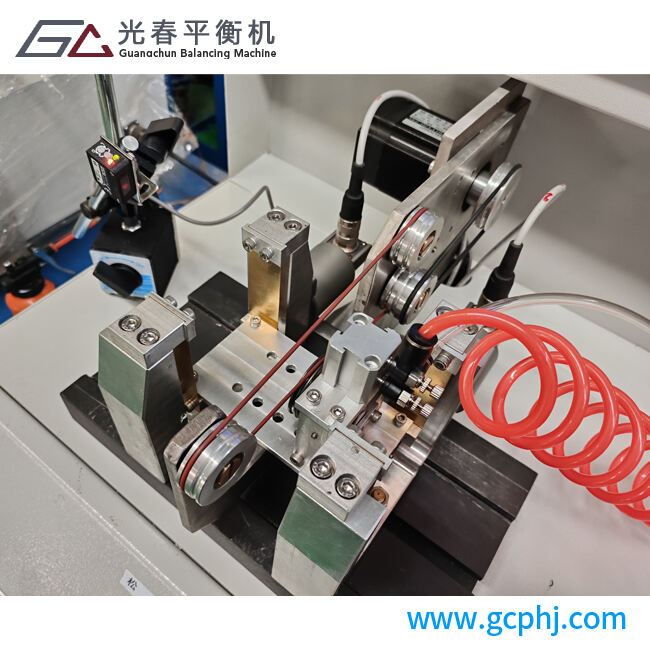
Սա զբաղված է կարգավոր հավասարակշեռության պահանջների համար փոքր ռոտորների համար, որը ունի երկու վարունքային устройствացուցակներ ամբողջական հավասարակշեռության համար, տարածական համակարգը օգտագործում է mięկ համակարգի կառուցվածք և հավաքած է բարձր ճշգրտությամբ սենսորներ՝ կարգավոր հավասարակշեռության չափման պահանջվող ճշգրտությունը իրականացնելու համար, իսկ չափման համակարգը ունի օգտագործող-մաքինային համակարգի հարմար chnittar: